Cars are much, much safer today than in the past. Everyone knows that seat belts, airbags, and anti-lock brakes have made cars safer. The future holds great promise: guidance and avoidance systems, fly-by-wire technology that will eliminate steering columns, and much more; culminating in self-driving vehicles that communicate with each other.
But cars remain dangerous, both to vehicle occupants and others, such as cyclists and pedestrians. The United States uses the Fatal Accident Reporting System (FARS) to gather information about every motor vehicle crash in which someone dies. Such an event requires sending detailed information to FARS. Police record many variables, including time, weather conditions, demographic data, and whether drugs or alcohol were involved.
STEP To see the data, open the Excel workbook SafetyRegulation.xls and read the Intro sheet, then go to the Data sheet.
You can see that 36,650 people died in 2018 in a traffic accident. About half of the fatalities were drivers, almost 5,000 were motorcyclists, and 7,354 were non-motorists.
While FARS has data on the total number of deaths back to 1994 (36,254), simply comparing total fatalities over time is not a good way to measure driving safety. Under Other National Statistics, the data show that, year after year, there are many more people driving cars many more miles. So, we need to adjust the total number of fatalities to account for these increases.
We need a fatality rate, not the total number of fatalities. By dividing total deaths by the number of miles traveled, we get a measure of fatalities per mile traveled. This results in a tiny number so, to make it easier to read, the fatality rate is reported per 100 million miles traveled.
Adjusting with miles traveled is not the only way to create a fatality rate. The Data sheet shows rates based on population, registered vehicles, and licensed drivers. They all tell the same story.
Figure 6.4 shows the United States traffic fatality rate. The number of fatalities per 100 million miles traveled has fallen from 1.73 in 1994 to 1.17 in 2017, which is about a 30% decrease during this time period. That is welcome news.
Figure 6.4: Traffic fatalities per 100 million miles traveled. Source: SafetyRegulation.xls!Data www-fars.nhtsa.dot.gov/
Less encouraging in Figure 6.4 is the leveling off since 2009 and the increase from 2014 to 2016. Distracted driving because of phone use and texting are suspected contributors.
The data in FARS only track fatalities and, thus, say nothing about nonfatal accidents. It turns out we are doing better here alsoinjury rates and severity of injury have also declined.
So, all is well? Actually, not exactly.
Although it may seem greedy, fatalities and injuries should have fallen by a lot more. We are doing better because fatal accident and injury rates have fallen, but we should be doing much, much better. After all, the car you drive today is much, much safer than a car from 20 or 30 years ago. If the vehicle you drive today is much safer than vehicles from 20 or 30 years ago, then fatal accident and injury rates should have fallen more to reflect these improvements. So, what is going on?
Economics can help answer this question. We will apply the remarkably flexible Theory of Consumer Behavior to driving a car. Any problem that can be framed as a choice given a set of exogenous variables can be analyzed via the economic approach. There are certainly choices to be made while driving: what route to take, how fast to drive, and what car to drive are three of many choices drivers make. We will focus on a subset of choices that involve how carefully to drive.
Theoretical Intuition
The key article that spawned a great deal of further work in this area was written in 1975 by University of Chicago economist Sam Peltzman. The abstract for "The Effects of Automobile Safety Regulation" (p. 677) says,
Technological studies imply that annual highway deaths would be 20 percent greater without legally mandated installation of various safety devices on automobiles. However, this literature ignores offsetting effects of nonregulatory demand for safety and driver response to the devices. This article indicates that these offsets are virtually complete, so that regulation has not decreased highway deaths. Time-series (but not cross-section) data imply some saving of auto occupants’ lives at the expense of more pedestrian deaths and more nonfatal accidents, a pattern consistent with optimal driver response to regulation.
This requires some translation. By technological studies, Peltzman is referring to estimates by engineers that are based on extrapolation. Cars with seat belts, airbags, anti-lock brakes, and so on are assumed to be driven in exactly the same way as cars without these safety features. This will give maximum bang for our safety buck.
Economics, however, tells us that we won’t get this maximum return on improved safety features because there is a driver response to being in a safer car. By offsetting effects, Peltzman means that the gains from the safety devices are countered, offset, by more aggressive driving.
Peltzman’s key insight, which separates an economist from the way an engineer considers the problem, is to incorporate driver response. He says on page 681:
The typical driver may thus be thought of as facing a choice, not unlike that between leisure and money income, involving the probability of death from accident and what for convenience I will call "driving intensity." More speed, thrills, etc., can be obtained only by forgoing some safety.
This claim sounds rather outrageous at first. Do I suddenly turn into an Indy 500 race car driver upon hearing that my car has airbags? No, but consider some practical examples in your own life:
Do you drive differently in the rain or snow than on a clear day?
Do speed bumps, if you can’t swerve around them, lead you to reduce your speed?
Would you drive faster on a road in Montana with no cars for miles around versus on the Dan Ryan Expressway in Chicago? In which case, Montana or Chicago (presuming you are actually moving on the Dan Ryan), would you pay more attention to the road and your driving?
If your car had some magic repulsion system that prevented you from hitting another car (we almost have this), would you drive faster and more aggressively?
Economists believe that agents change their behavior to find a new optimal solution when conditions change. In fact, many believe this is the hallmark of economics as a discipline. Many non-economists either do not believe this or are not aware of how this affects us in many different ways.
If you do not believe that safer cars lead to more aggressive driving, consider the converse: Do more dangerous cars lead to more careful driving? Here is how Steven Landsburg puts it:
If the seat belts were removed from your car, wouldn’t you be more cautious in driving? Carrying this observation to the extreme, Armen Alchian of the University of California at Los Angeles has suggested a way to bring about a major reduction in the accident rate: Require every car to have a spear mounted on the steering wheel, pointing directly at the driver’s heart. Alchian confidently predicts that we would see a lot less tailgating. (Landsburg, p. 5)
The idea at work here is only obvious once you are made aware of it. Consider the tax on cars over $30,000 passed by Congress in 1990. By adding a 10% tax to such luxury cars, staffers computed that the government would earn 10% of the sales revenue (price x quantity) generated by the number of luxury cars sold the year before the tax was imposed. They were sadly mistaken. Why?
People bought fewer luxury cars! This is a response to a changed environment. You cannot take for granted that everyone will keep doing the same thing when there is a shock.
This idea has far-reaching application. Consider, for example, its relevance to the field of macroeconomics. Robert Lucas won the Nobel Prize in Economics in 1995. His citation reads, "for having developed and applied the hypothesis of rational expectations, and thereby having transformed macroeconomic analysis and deepened our understanding of economic policy." (See www.nobelprize.org/prizes/economic-sciences/1995/press-release/)
What exactly did Lucas do to win the Nobel? One key contribution was pointing out that if policy makers fail to take into account how people will respond to a proposed new policy, then the projections of what will happen will be wrong. This is called the Lucas Critique.
The Lucas Critique is exactly what is happening in the case of safety features on cars. Economists argue that you should not assume that drivers are going to continue to behave in exactly the same way before and after the advent of automobile safety improvements.
What we need is a model of how drivers decide how to drive. The Theory of Consumer Behavior gives us that model. You know what will happen next: we will figure out the constraint. And after that? Preferences. That will be followed by the initial solution and, then, comparative statics. We will find the effect of safer cars on accident risk. This is the economic approach.
The Initial Solution
The driver chooses how intensively to drive, which means how aggressively to drive. Faster starts, not coming to a complete stop, changing lanes, and passing slower cars are all more intensive types of driving, as are searching for a song or talking on your phone while driving. More intensive driving saves time and it is more fun. Driving intensity is a good and more is better.
Unfortunately, it isn’t free. As you drive more intensively, your chances of having an accident rise. No one wants to crash, damaging property and injuring themselves or others. Your accident risk, the probability that you have an accident, is a function of how you drive.
The driver chooses a combination of two variables, Driving Intensity and Accident Risk, that maximize utility, subject to the constraint.
The equation of the constraint ties the two choice variables together in a simple way.
Safety Features represents the exogenous variable, safety technology, and provides a relative price at which the driver can trade risk for intensity.
On the Initial line in Figure 6.5, the driver is forced to accept a great deal of additional Accident Risk for a little more Driving Intensity because the line is so flat.
Figure 6.5: The driver’s constraint.
When cars get safer, the constraint line gets steeper, rotating counterclockwise from the origin, as shown in Figure 6.5. There are two ways to understand the improvement made available by better safety technology. The horizontal, dashed arrow shows that you can get the same Driving Intensity at a much lower Accident Risk. You can also read the graph vertically. For a given Accident Risk, a safer car gives you a lot more Driving Intensity (follow the vertical, solid arrow).
Figure 6.5 shows that safer technology can be interpreted as a decrease in the price of Driving Intensity. It affects the graph just like a decrease in \(p_2\) in the Standard Model.
The constraint is only half of the story. We need preferences to find out how a driver will decide to maximize satisfaction.
We use a Cobb-Douglas functional form to model the driver’s preferences for Accident Risk (\(x_1\)) and Driving Intensity (\(x_2\)), subtracting Accident Risk from a constant so that increases in \(x_1\) lead to less utility. \[U(x_1,x_2)=(1-x_1)^cx_2^d\] Risk is measured between zero and 100 percent so \(0 \le x_1 \le 1\). As \(x_1\) increases in this interval, utility falls. The indifference curves will be upward sloping because \(x_1\), Accident Risk, is a bad.
We can solve this model via numerical and analytical methods. We begin with Excel’s Solver.
STEP Proceed to the OptimalChoice sheet.
The sheet shows the goal, endogenous variables, and exogenous variables. Initially, the driver is at 25%,0.25, which is a point on the budget line (because the constraint cell shows zero). We will use % notation for Accident Risk because it is a probability. The unrealistically high chances of an accident were chosen to maximize visibility on the graph. We use decimal points (such as 0.5) for the driving intensity variable, which we interpret as an index number on a scale from 0 to 1.
We know the opening point is feasible, but is it an optimal solution?
In previous Excel files, the graph is immediately displayed so you can instantly see if there is a tangency. The missing graph gives you a chance to exercise your analytical powers. Can you create a mental image of the chart even though it is not there? Remember, comparing the slope of the budget line to the MRS at any point tells us what is going on.
The slope is simply the Safety Features exogenous variable, which is \(+1\). So now the graph looks like Figure 6.5 with a 45 degree line from the origin.
But what about the indifference curves? The MRS is minus the ratio of marginal utilities. With \(c = d = 1\), we have
\[M R S=-\dfrac{\dfrac{d U}{d x_{1}}}{\dfrac{d U}{d x_{2}}}=-\dfrac{-x_{2}}{1-x_{1}}=\dfrac{x_{2}}{1-x_{1}}\]
We evaluate this expression at the chosen point, 25%, 0.25, and get
In addition, we know he can increase satisfaction by taking more risk and more intensity, traveling up the budget line because the indifference curve is flatter (\(\dfrac{1}{3}\)) than the budget line (\(+1\)) at the opening point of 25%,0.25.
Do you have a picture in your mind’s eye of this situation? Think about it. Remember, the MRS is smaller than the slope so the indifference curve has to be flatter where it cuts the line.
STEP When you are ready (after you have formed the mental picture of the situation), click the button to see what is going on at the 25%,0.25 point.
The canonical graph (with a bad) appears and the cells below the chart show the slope and MRS at the chosen point.
STEP Next, run Excel’s Solver to find the optimal solution.
With \(c = d = 1\) and a Safety Features value of 1, it is not surprising that the optimal solution is at 50%,0.50. Of course, at this point, the slope = MRS.
To implement the analytical approach, the Lagrangean looks like this:
An exercise asks you to find the reduced form solution.
Comparative Statics
Suppose we get safer cars so the terms of trade between Driving Intensity and Accident Risk improve. What happens to the optimal solution?
STEP Change cell B16 to 2.
How does the engineer view the problem? To her, the driver keeps acting the same way, driving just like before. There will be a great gain in safety with much lower risk of an accident. This is shown by the left-pointing arrow in Figure 6.6. Intensity stays the same and risk falls by a great deal.
Figure 6.6: Improved safety features shock.
Source: SafetyRegulation.xls!OptimalChoice
For the engineer, because Driving Intensity remains constant, if it was 0.5, then improving Safety Features to 2 makes the accident risk fall to 25%. We simply travel horizontally along a given driving intensity to the new constraint.
The economist doesn’t see it this way at all. She sees Driving Intensity as a choice variable and as the solution to an optimization problem. Change the parameters and you change the optimizing agent’s behavior. It is clear from Figure 6.6 that the driver is not optimizing because the slope does not equal the MRS.
STEP With new safety technology rotating the constraint line, we must run Solver to find the new optimal solution.
The result is quite surprising. The Accident Risk has remained exactly the same! What is going on? In Peltzman’s language, this is completely offsetting behavior. The optimal response to the safer car is to drive much more aggressively and this has completely offset the gain from the improved safety equipment.
How can this be? By decomposing the zero total effect on Accident Risk into its income and substitution effects, we can better understand this curious result.
Figure 6.7 shows what is happening. The improved safety features lower the price of driving intensity, so the driver buys more of it. On the y axis, the substitution and income effects work together to increase the driver’s speed, lane changes, and other ways to drive more intensively. On the x axis, which measures risk taken while driving, the effects oppose each other, canceling each other out and leaving no gain in accident safety.
Figure 6.7: Income and substitution effects.
As driving intensity gets cheaper, the substitution effect (the move from A to B in Figure 6.7) leads the driver to choose more intensity and pay for it with more risk. The income effect leads the driver to buy yet more intensity and (because risk is a normal bad) less risk. The end result, for this utility function, is completely offsetting behavior.
Of course, this is not necessarily what we would see in the real world. We do not know how many drivers are represented by these preferences. The income effect for risk could outweigh the substitution effect, leaving point C to the left of A in Figure 6.7.
Theory alone cannot answer the question of what we will see in the real world. Empirical work in this area does confirm that offsetting behavior exists, but there is disagreement as to its extent.
An Economic Analysis of Driving
Choices abound when it comes to cars and driving. Should I take the highway or stay on a surface street? Change the oil now or wait a while longer? Pass this slow car or just take it easy and get there a few minutes later? Because there are choices, we can apply economics. This chapter focused on applying the Theory of Consumer Behavior to the choice of how intensively to drive. The agent is forced to trade off a bad (the risk of having an accident) for getting there faster and greater driving enjoyment.
Yes, teenagers make different choices than older drivers and everyone drives differently on a congested, icy road than on a sunny day with no traffic, but our comparative statics question focused on how improved automobile technology impacts the optimal way to drive.
Offsetting behavior is an application of the Lucas Critique: do not extrapolate. Instead, we should recognize that agents change their behavior when the environment changes. Theory cannot tell us how much offsetting behavior we will get. Only data and econometric analysis can tell us that.
Economists believe that we have not had as great a reduction in automobile fatalities and injuries as our much, much safer cars would enable because drivers have chosen to maximize satisfaction by trading some safety for driving intensity. Offsetting behavior explains why we aren’t doing much, much better in traffic fatalities. But do not despairwe are maximizing satisfaction given our new technology.
Exercises
Use the equation that follows to solve for \(x_1 \mbox{*}\) and \(x_2 \mbox{*}\) in terms of S (safety features). Show your work. \[\max _{x_{1}, x_{2}, \lambda} L=\left(1-x_{1}\right) x_{2}+\lambda\left(x_{2}-S x_{1}\right) \nonumber\]
Use your reduced form solution to find the S elasticity of \(x_1 \mbox{*}\) at \(S=1\). Show your work.
If the utility function was such that Driving Intensity was a Giffen good, describe where point C would be located on Figure 6.7.
If the utility function was such that Driving Intensity was a Giffen good, would this raise or lower traffic fatalities? Explain.
References
The epigraph is from page 125 of Thomas P. Wenzel and Marc Ross, “Safer Vehicles for People and the Planet,” American Scientist, Vol. 96, No. 2 (March–April, 2008), pp. 122–128, www.americanscientist.org/article/safer-vehicles-for-people-and-the-planet. They claim that the conventional wisdom that we need cars to be heavy to be safe is wrong. Heavier cars waste more fuel. How much more? “If a typical car could somehow drop 10% of its mass, its fuel economy would increase by anywhere from 3% to 8%. (The larger value applies if the size of the engine is also reduced to keep acceleration performance the same.)” (p. 124). The authors are not economists, but notice how they frame the result with percentage changes.
For an excellent review of empirical work on traffic safety, see Traffic Safety by Leonhard Evans, online at www.scienceservingsociety.com/.
This original idea is from Sam Peltzman, “The Effects of Automobile Safety Regulation,” The Journal of Political Economy, Vol. 83, No. 4 (August, 1975), pp. 677–726, www.jstor.org/stable/1830396
For a simple (no math or graphs) explanation of the idea behind offsetting behavior, see “The Power of Incentives: How Seat Belts Kill,” in Steven E. Landsburg, The Armchair Economist (New York: The Free Press, 1993).
Russell S. Sobel and Todd M. Nesbit point out that aggregated traffic fatality data is a poor way to test for a Peltzman effect. They find strong support for offsetting behavior from improved safety in professional auto racing in “Automobile Safety Regulation and the Incentive to Drive Recklessly: Evidence from NASCAR,” Southern Economic Journal, Vol. 74, No. 1 (Jul., 2007), pp. 71-84, www.jstor.org/stable/20111953.



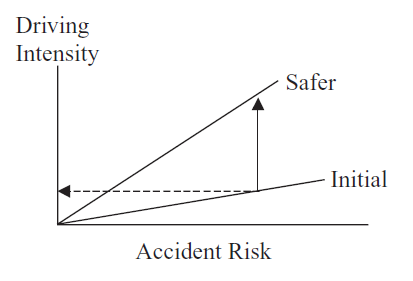 Figure 6.5: The driver’s constraint.
Figure 6.5: The driver’s constraint. button to see what is going on at the 25%,0.25 point.
button to see what is going on at the 25%,0.25 point.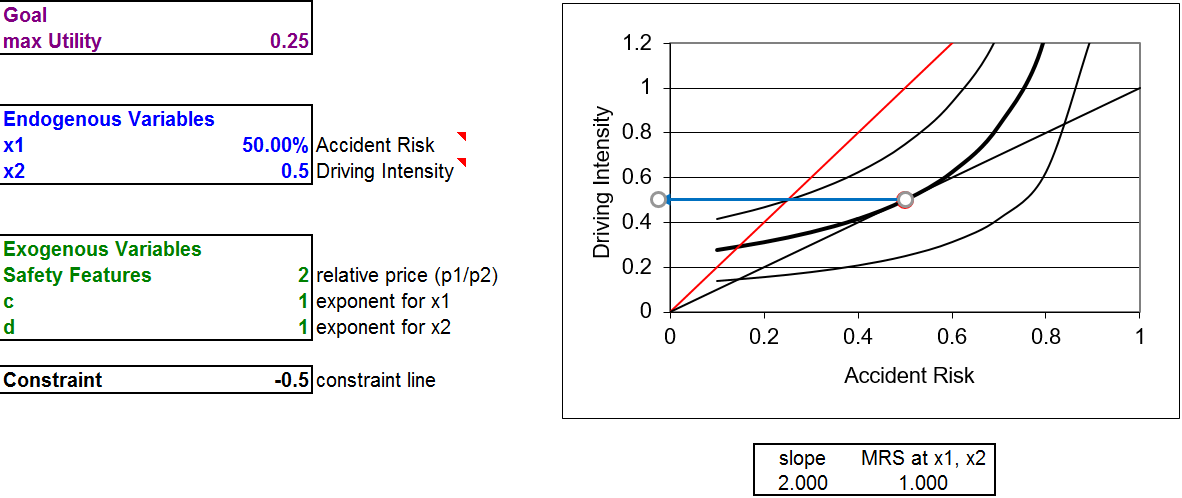
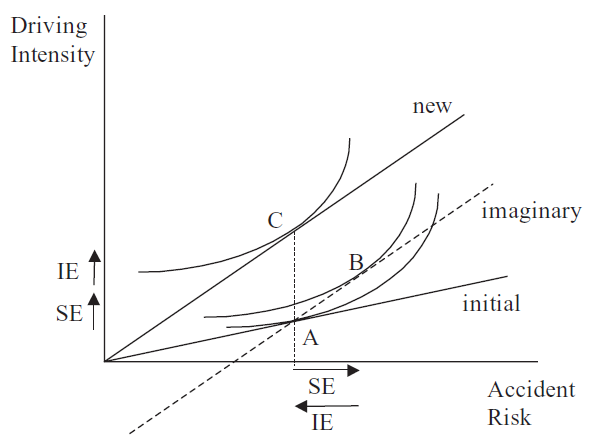 Figure 6.7: Income and substitution effects.
Figure 6.7: Income and substitution effects.