Input cost minimization is one of the three optimization problems faced by the firm. It revolves around the question of choosing the best combination of inputs, L and K, to produce a given level of output, q.
The best combination is defined as the cheapest one. The idea is that many combinations of L and K can produce a given q. We want to know the amounts of labor and capital that should be used to produce a given amount of output as cheaply as possible.
Of course, we answer this question by setting up and solving an optimization problem; then we do comparative statics. Because there is a constraint (we must produce the given q), we will use the Lagrangean method.
Setting up the Problem
The economic approach organizes optimization problems by answering three questions:
What is the goal?
What are the choice variables?
What are the given variables?
The goal is to minimize total cost, TC, which is simply the sum of the amount paid to the workers, wL, and the amount spent on renting machines, rK.
The endogenous variables are L and K. Labor is measured in hours and capital is the number of machines. The firm can decide to produce the given output by being labor intensive (using lots of labor and little capital), or roughly equal amounts of both, or by renting a lot of machinery and using little labor.
The exogenous variables are the input prices, wage rate (w), and the rental price of capital (r). The wage rate, or wage for short, is measured in $/hour and the rental price of capital is $/machine. We assume that the firm is a price taker in the markets for labor and capital so it can rent as much L and K as it wants at the given w and r. The amount to produce, q, is also an exogenous variable in this problem. We are not considering how much should be produced, but what is the best way to produce any given amount of output. Finally, the firm’s technology, the production function, \(f(L, K)\), is also given.
Because the firm has to produce a given amount of output, we know this is a constrained optimization problem. Our work in the Theory of Consumer Behavior has made us expert at solving this kind of problem. As you will see, the analysis is similar, but there are some striking differences.
One thing that does not change is our framework. We first explore the constraint to determine our options, then focus on the goal (to minimize TC), and, finally, we will combine the two to find the initial optimal solution.
The Constraint
The menu of options available to the firm is given by the isoquant. It serves as the constraint because the firm is free to choose L and K on the condition that it must produce the assigned level of output. Mathematically, the equation for the constraint is simply the production function, \(q = f(L, K)\).
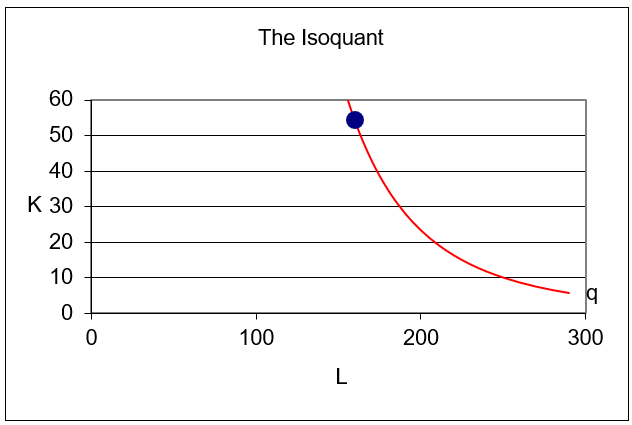
STEP Open the Excel workbook InputCostMin.xls, read the Intro sheet, then go to the Isoquant sheet to see the isoquant displayed in Figure 11.1.
Figure 11.1: An isoquant from a Cobb-Douglas production function.
Source: InputCostMin.xls!Isoquant.
Like the budget constraint in the Theory of Consumer Behavior gives us consumption possibilities, the isoquant gives the firm its feasible input options. All combinations below and left of the isoquant are ruled out. For example, there is no way to produce 100 units of output, holding quality and everything else constant, with the L,K combination of 100,20. The technology is simply not advanced or powerful enough to make 100 units of output with 100 hours of work and 20 machines.
The points above and to the right of the isoquant are feasible, but they are clearly wasteful. In other words, the firm could produce 100 units of output with an L,K combination of 250,50, but the isoquant tells the firm it does not need that much labor and capital to make 100 units. At 250,50, it could travel straight down to K = 10 and still produce q = 100 or straight left (on the horizontal line at K = 50) until it hit the isoquant and use a lot less labor. The firm could also travel in a diagonal, southwest direction until it hit the isoquant to economize on both inputs.
Points off the isoquant to the northeast (such as 250,50) are said to be technically inefficient. The inefficient part tells us that the firm is not minimizing its total cost at that point; technical describes the fact that the firm is not organizing its inputs so as to maximize output. In other words, the firm is not correctly solving the engineering optimization problem represented by the production function. Making 100 units of output with 250 hours of labor and 50 machines means that you are not getting the most out of your labor and capital. Economists call this situation technically inefficient.
Since the firm cannot choose a combination below the isoquant and it is wasteful to choose a combination above the isoquant, we know the answer has to lie on the isoquant.
STEP Use the scroll bar next to cell B11 to see the input mixes the firm might choose. As you change cell B11, the cell below changes also. It has a formula that computes the amount of K needed to produce the required output when you choose a value for L.
The idea is quite clear: The firm will roll around the isoquant in search of the best combination. Rolling is a good word choice and image to rememberthe firm is free to choose a point high up or roll down to the bottom right. Because we do not have the input prices, we cannot find the optimal solution with the isoquant alone.
STEP Change the exogenous variables to see how the isoquant is affected. Increases in A, c, and d pull the isoquant down. That makes sense given that these shocks are all productivity enhancing and the firm will need less L and K to make the given q = 100.
Lowering q has the same effect, but this is not a productivity shock. You are simply telling the firm it does not have to produce as much as before so it makes sense that it can use less labor and capital.
Notice how the constraint for this input cost minimization problem is a curve, not a line like it was for the utility maximization problem. Mathematically, that does not matter much, but it will impact the graph we draw to show the initial solution.
Goal
With the constraint in hand, we are ready to model the goal. In this problem, the goal is represented by a series of isocost (equal cost) lines.
Total cost is \(TC = wL+ rK\). If we solve this equation for K (in order to graph it in L-K space), we get the equation of a line: \[TC = wL + rK\] \[rK = TC - wL\] \[K = \frac{TC}{r} - \frac{w}{r}L\] The K (or y axis) intercept is \(\frac{TC}{r}\) and the slope is \(- \frac{w}{r}\).
Isocosts are a little tricky at first because you are used to seeing a linear constraint and a set of indifference curves. Input cost minimization has a curved constraint and a set of linear isocosts. In the equation of the line above, TC can take on any value. Thus, there is an isocost for \(TC=\$500\) and another for \(TC=\$500.01\) and an isocost for every single dollar amount. Every L,K point is on an isocost and the L,K points that have the same TC are on the same isocost.
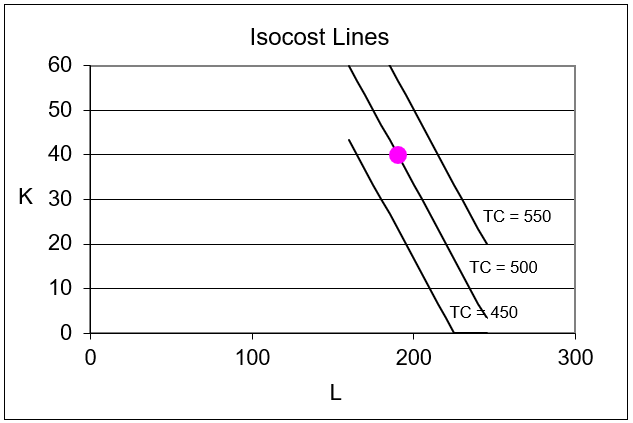
STEP Proceed to the Isocost sheet to see how the isocost lines are used to find the optimal solution.
Each point on a particular isocost line has the exact same total cost. So, the point on Figure 11.2 (and on your screen) has a cost of $500 (since 2 x 190 + 3 x 40 = 500).
Figure 11.2: Three representative isocost lines.
Source: InputCostMin.xls!Isocost.
STEP Click the to see how the firm’s cost minimization goal is represented on this graph.
The firm can move to a new point by choosing a different combination of L and K. If the new point has the same TC of $500 as the initial point, then it will be on the same $500 isocost.
STEP Increase L by 30 and decrease K by 20 so you will be at another point on the same isocost line of $500.
Now you know that all points on the TC = $500 isocost line share the same total cost of $500. It is also obvious that the slope of each isocost line is \(- \frac{2}{3}\) since \(w=2\) and \(r=3\).
Because the firm can choose the input mix, it can choose any combination of L and K, provided that the chosen combination can produce the given amount of output. The firm wants to hire as few inputs as it can (to save on costs), but it has to meet the production target. How can it solve this problem?
The Initial Optimal Solution
We have the constraint (the isoquant) and the goal (get to the lowest isocost possible), so now we combine the two to find the optimal solution.
STEP Proceed to the OptimalChoice sheet.
The starting position shows an L,K combination that costs $482.81. You can confirm this number both in cell B7 and on the chart (the middle label for the middle line).
The idea is to be on the lowest isocost line (i.e., the one with the smallest intercept) that is just touching the isoquant because that means the firm will be minimizing the total cost of producing the given level of output.
Clearly, the starting position is not optimal. You can see that the isocost is intersecting the isoquant. This information is also revealed by the slope and TRS information below the chart. The TRS, which is the slope of the isoquant at a point, is greater (in absolute value) than the slope of the isocost line at that point.
At the opening position, the firm is said to suffer from allocative inefficiency because it is on the isoquant, but it fails to choose the cost minimizing input mix. Because it is on the isoquant, we know it is not technically inefficientit is using the opening combination of L and K to get the maximum output. The problem is that it is using the wrong combination of inputs in the sense that there is a cheaper way to produce the given output.
We know there are two ways to solve optimization problems: analytically and numerically. Because we have Excel and the problem implemented on the sheet, we begin with the numerical approach.
STEP Run Solver. The optimal solution is depicted by the canonical graph displayed in Figure 11.3.
Solver’s answer, which is correct, has the firm choose an L,K combination whose isocost just touches the isoquant. There is no cheaper combination that can produce 100 units with the existing technology (given by the production function). If the firm went to an isocost that was one cent lower, it could not rent enough L and K to make 100 units of output.
Figure 11.3: The initial optimal solution.
Source: InputCostMin.xls!OptimalChoice, after running Solver.
We can confirm Solver’s result by applying the Lagrangean method to solve this constrained optimization problem.
We start by writing down the problem, using the parameter values from the OptimalChoice sheet. \[\begin{gathered} %star suppresses line # \min\limits_{L,K}TC=2L+3K\\ \textrm{s.t. } 100 = L^{0.75}K^{0.2}\end{gathered}\] The first step is to rewrite the constraint so that it is equal to zero. \[100 - L^{0.75}K^{0.2}=0\] The second step is to form the Lagrangean by adding lambda, \(\lambda\), times the rewritten constraint to the original objective function. We use an extra-large L for the Lagrangean function that is not at all related to the L for labor. \[\begin{gathered} %star suppresses line # \min\limits_{L,K, \lambda}{\large\textit{L}}=2L+3K + \lambda (100- L^{0.75}K^{0.2})\end{gathered}\] The third step to finding the optimal solution is to take the derivative of the Lagrangean with respect to each endogenous variable and set each derivative to zero (giving us the first-order conditions).
The fourth, and last, step is to solve this system of equations for \(L\mbox{*}\), \(K\mbox{*}\), and \(\lambda \mbox{*}\). The system of three equations contains the answer, that is, the values of L and K that minimize TC. Our task is to use the equations to find these values that satisfy the three equations.
There are many ways to solve the system, but we will use the same approach that we used in the Theory of Consumer Behavior. We will reduce the system from 3 to 2 to 1 equation and unknown.
We move the terms with lambda in the first two equations to the right-hand side and then divide the first equation by the second. The Cobb-Douglas production function is easy to work with because the exponents of L and K sum to -1 and 1, respectively, when you apply the \(\frac{x^a}{x^b}=x^{a-b}\) rule.
As you can see above, this strategy cancels the lambdas and gives an expression for \(L = f (K)\), which, in conjunction with the third first-order condition, reduces the system to two equations with two unknowns. \[\begin{gathered} %star suppresses line # L=5.625K \\ 100- L^{0.75}K^{0.2}\end{gathered}\] We substitute the expression for L into the constraint (the third first-order condition) and solve for \(K\mbox{*}\).
Then, substituting \(K\mbox{*}\) back into the expression for \(L = f (K)\), we get \(L\mbox{*}\). \[\begin{gathered} %star suppresses line # L=5.625K \\ L=5.625[32.588] \\ L\mbox{*}=183.31\end{gathered}\] Substituting \(L\mbox{*}\) and \(K\mbox{*}\) into the original objective function, we can compute the minimum cost of producing 100 units. \[\begin{gathered} %star suppresses line # TC = 2L + 3K \\ TC = 2[183.1]+3[32.588] \\ TC\mbox{*}=\$464.38\end{gathered}\] The analytical solution agrees with Solver’s answer.
The work we did in dividing the first equation by the second yields an equimarginal condition that is similar to the MRS = \(\frac{p_1}{p_2}\) rule from constrained utility maximization. At the optimal solution, we have \[\frac{2}{3}=\frac{3.75K}{L}\] The left-hand side is the input price ratio and the right-hand side is the TRS. Thus, at the optimal solution we know that input price ratio must equal the TRS. This is a mathematical statement of the tangency we see in Figure 11.3.
If this equimarginal condition is not met, but the firm is on the isoquant (i.e., it is technically efficient), then we have allocative inefficiency. If \(|TRS| > \frac{w}{r}\), then the isocost is cutting the isoquant and the firm can lower total costs by rolling down the isoquant. The reverse, of course, applies if \(|TRS| < \frac{w}{r}\).
STEP If you have not done so already, double-click inside the box around cell J25 and use the scroll bar to show how the isocost and isoquant graph matches up with the TRS = \(\frac{w}{r}\) equimarginal condition.
Comparing Consumer and Firm
Figure 11.3 bears a striking resemblance to the canonical graph used in the Theory of Consumer Behavior and the analytical work also contains strong similarities, but there are some critical differences between the consumer and firm optimization problems. Figure 11.4 presents a side-by-side comparison to highlight the contrasts between them.
Figure 11.4: Comparing consumer and firm optimization problems.
It makes sense to use the knowledge and skills learned from the Theory of Consumer Behavior, but do not fall into a false sense of security. The input cost minimization problem has its own characteristics and terminology.
Cost Minimization is One of Three Problems
The Theory of the Firm is actually a set of three interrelated optimization problems. The initial solution to the firm’s cost minimization problem focuses attention on the cheapest combination of inputs to produce a given level of output.
We can apply the same techniques we used to solve the consumer’s utility maximization problem. The canonical graph is similar to the standard graph from the Theory of Consumer Behavior, but as Figure 11.4 shows, there are substantial differences between utility maximization and cost minimization.
One important similarity is the continued use of the comparison of a price ratio to the slope of a curve to determine whether the optimal solution has been found. In the case of the constrained cost minimization problem, the firm will choose that combination of inputs where TRS = \(\frac{w}{r}\). If this condition is not met, the direction of the inequality (> or <) tells us which way the firm should move to find the minimum total cost.
Now that we understand the firm’s cost minimization problem and have found the initial solution, we are prepared to take the next stepcomparative statics analysis. The economic approach is unrelenting and monotonous. We apply the same framework to every problem. Through practice and repetition, you will learn to think like an economist.
Exercises
The Q&A sheet asks you to change r to 30 and use Solver to find the initial solution. Find the initial solution to this same problem via analytical methods and compare the two results. Are they the same? Show your work.
The fixed proportions production function, \(q = min\{\alpha L, \beta K\}\) is analogous to the perfect complements utility functional form. Suppose \(\alpha = \beta = 1\), w = 10, r = 50, and q = 100. Find \(L\mbox{*}\), \(K\mbox{*}\), and \(TC\mbox{*}\). Show your work. Use Word’s Drawing Tools to draw a graph of the optimal solution.
Given the quasilinear production function, \(q = \sqrt{L}+K\), and input prices r = 2, and w = 5, find the cheapest way to produce 1000 units of output. Use analytical methods and show your work.
Set up the problem in question 3 in Excel and use Solver to find the optimal solution. Take a screen shot of the solution on your spreadsheet and paste it into a Word document.
Can isoquants intersect? Explain why or why not.
References
The epigraph is from page 1044 of Joseph Schumpeter’s History of Economic Analysis (published in 1954, shortly after his death). This classic traces the intellectual history of economics from Aristotle to the 20th century. Schumpeter reviews the theories and visions of giants like Adam Smith and Karl Marx, but also an incredible number of philosophers and economists that will not be familiar to you.
Ragnar Frisch, credited by Schumpeter with inventing the term isoquant, had a knack for inventing words, e.g., macroeconomics and econometrics. Luckily, "substitumal cost flexibility" did not catch on. A Norwegian, Frisch was part of an exceptionally strong quantitative and empirical tradition in Scandinavian economics that remains alive to this day.


 to see how the firm’s cost minimization goal is represented on this graph.
to see how the firm’s cost minimization goal is represented on this graph.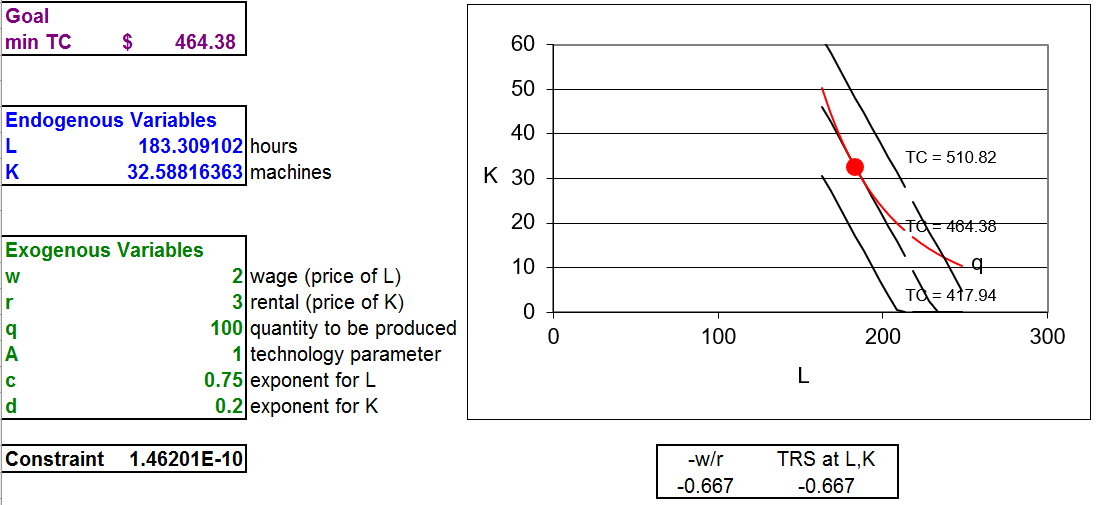
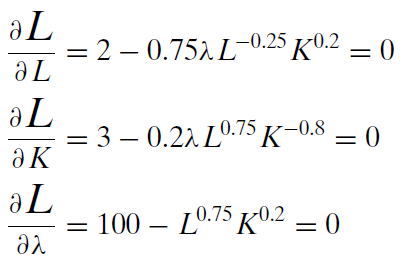
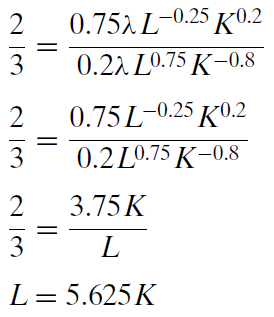
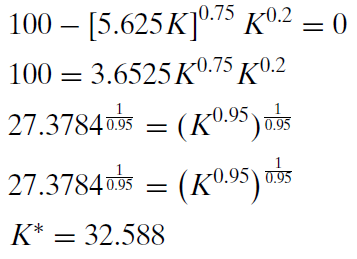
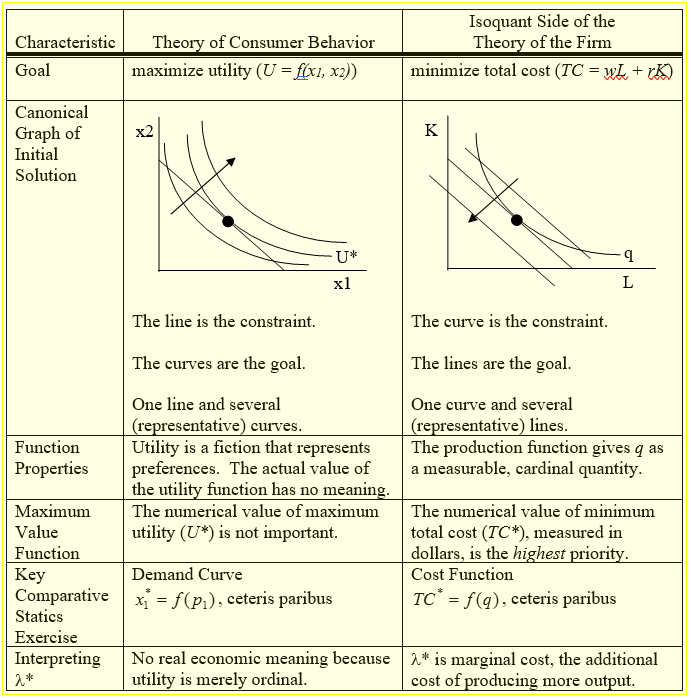 Figure 11.4: Comparing consumer and firm optimization problems.
Figure 11.4: Comparing consumer and firm optimization problems.