
2.6: Relays and Multiple Realizations
- Page ID
- 21213

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Many of the ideas that we have been considering in this chapter have stemmed from Shannon’s (1938) logical interpretation of relay circuits. But what is a relay? A relay is essentially a remote-controlled switch that involves two separate circuits (Gurevich, 2006). One of these circuits involves a source of current, which can be output through the relay’s drain. The second circuit controls the relay’s gate. In an electromechanical relay, the gate is an electromagnet (Figure 2-2). When a signal flows through the gate, the magnet becomes active and pulls a switch closed so that the source flows through the drain. When the gate’s signal is turned off, a spring pulls the switch open, breaking the first circuit, and preventing the source from flowing through the drain.
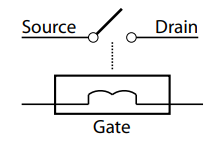
Figure 2-2. A relay, in which a signal through an electromagnetic gate controls a switch that determines whether the current from the source will flow through the drain.
The relay shown in Figure 2-2 can be easily reconfigured to convert it into a NOT gate. This is accomplished by having the switch between the source and the drain pulled open by the gate, and having it closed by a spring when the gate is not active. This was how, in 1835, Joseph Henry turned the power off to a large electromagnet, causing it to drop its load and startle his class (Moyer, 1997).
The type of relay shown in Figure 2-2 was critically important to the development of the telegraph in the mid-nineteenth century. Telegraphs worked by sending electrical pulses—dots and dashes—long distances over copper wire. As the signals travelled, they weakened in intensity. In order to permit a message to be communicated over a long distance, the signal would have to be re-amplified at various points along its journey. Relays were the devices that accomplished this. The weak incoming signals were still strong enough to activate a relay’s magnet. When this happened, a stronger current—provided by the source—was sent along the telegraph wire, which was connected to the relay’s drain. The relay mechanism ensured that the pattern of pulses being sent along the drain matched the pattern of pulses that turned the gate on and off. That is, the periods of time during which the relay’s switch was closed matched the durations of the dots and dashes that operated the relay’s magnet. The ability of a telegraph company to communicate messages over very long distances depended completely on the relays that were interspersed along the company’s network.
This dependence upon relays played a critical role in the corporate warfare between competing telegraph companies. In 1874, the only relay in use in the telegraph industry was an electromagnetic one invented by Charles Grafton Page; the patent for this device was owned by Western Union. An imminent court decision was going to prevent the Automatic Telegraph Company from using this device in its own telegraph system because of infringement on the patent.
The Automatic Telegraph Company solved this problem by commissioning Thomas Edison to invent a completely new relay, one that avoided the Page patent by not using magnets (Josephson, 1961). Edison used a rotating chalk drum to replace the electromagnet. This is because Edison had earlier discovered that the friction of a wire dragging along the drum changed when current flowed through the wire. This change in friction was sufficient to be used as a signal that could manipulate the gate controlling the circuit between the source and the drain. Edison’s relay was called a motograph.
Edison’s motograph is of interest to us when it is compared to the Page relay. On the one hand, the two devices performed the identical function; indeed, Edison’s relay fit exactly into the place of the page relay:
First he detached the Page sounder from the instrument, an intensely interested crowd watching his every movement. From one of his pockets he took a pair of pliers and fitted [his own motograph relay] precisely where the Page sounder had been previously connected, and tapped the key. The clicking—and it was a joyful sound—could be heard all over the room. There was a general chorus of surprise. ‘He’s got it! He’s got it!’ (Josephson, 1961, p. 118)
On the other hand, the physical principles governing the two relays were completely different. The key component of one was an electromagnet, while the critical part of the other was a rotating drum of chalk. In other words, the two relays were functionally identical, but physically different. As a result, if one were to describe the purpose, role, or function of each relay, then the Page relay and the Edison motograph would be given the same account. However, if one were to describe the physical principles that accomplished this function, the account of the Page relay would be radically different from the account of the Edison motograph—so different, in fact, that the same patent did not apply to both. Multiple realization is the term used to recognize that different physical mechanisms can bring identical functions to life.
The history of advances in communications and computer technology can be described in terms of evolving multiple realizations of relays and switches. Electromagnetic relays were replaced by vacuum tubes, which could be used to rapidly switch currents on and off and to amplify weak signals (Reid, 2001). Vacuum tubes were replaced by transistors built from semiconducting substances such as silicon. Ultimately, transistors were miniaturized to the point that millions could be etched into a single silicon chip.
One might suggest that the examples listed above are not as physically different as intended, because all are electrical in nature. But relays can be implemented in many nonelectrical ways as well. For example, nanotechnology researchers are exploring various molecular ways in which to create logic gates (Collier et al., 1999; Okamoto, Tanaka, & Saito, 2004). Similarly, Hillis (1998) described in detail a hydraulic relay, in which the source and drain involve a high-pressure water line and a weaker input flow controls a valve. He pointed out that his hydraulic relay is functionally identical to a transistor, and that it could therefore be used as the basic building block for a completely hydraulic computer. “For most purposes, we can forget about technology [physical realization]. This is wonderful, because it means that almost everything that we say about computers will be true even when transistors and silicon chips become obsolete” (p. 19).
Multiple realization is a key concept in cognitive science, particularly in classical cognitive science, which is the topic of Chapter 3. Multiple realization is in essence an argument that while an architectural account of a system is critical, it really doesn’t matter what physical substrate is responsible for bringing the architecture into being. Methodologically this is important, because it means that computer simulation is a viable tool in cognitive science. If the physical substrate doesn’t matter, then it is reasonable to emulate the brain-based architecture of human cognition using completely different hardware—the silicon chips of the digital computer. Theoretically, multiple realization is also important because it raises the possibility that non-biological systems could be intelligent and conscious. In a famous thought experiment (Pylyshyn, 1980), each neuron in a brain is replaced with a silicon chip that is functionally equivalent to the replaced neuron. Does the person experience any changes in consciousness because of this change in hardware? The logical implication of multiple realization is that no change should be experienced. Indeed, the assumption that intelligence results from purely biological or neurological processes in the human brain may simply be a dogmatic attempt to make humans special when compared to lower animals or machines (Wiener, 1964, p. 31): “Operative images, which perform the functions of their original, may or may not bear a pictorial likeness to it. Whether they do or not, they may replace the original in its action, and this is a much deeper similarity.”