
3.10: Structure and Process
- Page ID
- 35721

The physical symbol systems of classical cognitive science make a sharp distinction between symbols and the rules that manipulate them. This is called the structure/ process distinction. For instance, in a Turing machine the symbols reside in one medium (the ticker tape) that is separate from another medium (the machine head) that houses the operators for manipulating symbols. Whatever the specific nature of cognition’s universal machine, if it is a classical physical symbol system, then it will exhibit the structure/process distinction.
In general, what can be said about the symbols that define the structure that is manipulated by a physical symbol system? It has been argued that cognitive science’s notion of symbol is ill defined (Searle, 1992). Perhaps this is because apart from the need that symbols be physically distinctive, so that they can be identified as being tokens of a particular type, symbols do not have definitive properties. Symbols are arbitrary, in the sense that anything can serve as a symbol.
The arbitrary nature of symbols is another example of the property of multiple realization that was discussed in Chapter 2.
What we had no right to expect is the immense variety of physical ways to realize any fixed symbol system. What the generations of digital technology have demonstrated is that an indefinitely wide array of physical phenomena can be used to develop a digital technology to produce a logical level of essentially identical character. (Newell, 1980, p. 174)
This is why universal machines can be built out of gears (Swade, 1993), LEGO (Agulló et al., 2003), electric train sets (Stewart, 1994), hydraulic valves, or silicon chips (Hillis, 1998).
The arbitrariness of symbols, and the multiple realization of universal machines, is rooted in the relative notion of universal machine. By definition, a machine is universal if it can simulate any other universal machine (Newell, 1980). Indeed, this is the basic idea that justifies the use of computer simulations to investigate cognitive and neural functioning (Dutton & Starbuck, 1971; Gluck & Myers, 2001; Lewandowsky, 1993; Newell & Simon, 1961; O’Reilly & Munakata, 2000).
For any class of machines, defined by some way of describing its operational structure, a machine of that class is defined to be universal if it can behave like any machine of the class. This puts simulation at the center of the stage. (Newell, 1980, p. 149)
If a universal machine can be simulated by any other, and if cognition is the product of a universal machine, then why should we be concerned about the specific details of the information processing architecture for cognition? The reason for this concern is that the internal aspects of an architecture—the relations between a particular structure-process pairing—are not arbitrary. The nature of a particular structure is such that it permits some, but not all, processes to be easily applied. Therefore some input-output functions will be easier to compute than others because of the relationship between structure and process. Newell and Simon (1972, p. 803) called these second-order effects.
Consider, for example, one kind of representation: a table of numbers, such as Table 3-1, which provides the distances in kilometres between pairs of cities in Alberta (Dawson, Boechler, & Valsangkar-Smyth, 2000). One operation that can easily be applied to symbols that are organized in such a fashion is table lookup. For instance, perhaps I was interested in knowing the distance that I would travel if I drove from Edmonton to Fort McMurray. Applying table lookup to Table 3-1, by looking for the number at the intersection between the Edmonton row and the Fort McMurray column, quickly informs me that the distance is 439 kilometres. This is because the tabular form of this information makes distances between places explicit, so that they can be “read off of ” the representation in a seemingly effortless manner.
Other information cannot be so easily gleaned from a tabular representation. For instance, perhaps I am interested in determining the compass direction that points from Edmonton to Fort McMurray. The table does not make this information explicit—directions between cities cannot be simply read off of Table 3-1.
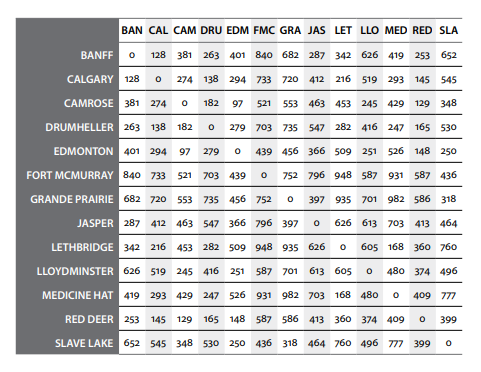
Table 3-1. Distances in kilometres between cities in Alberta, Canada.
However, this does not mean that the table does not contain information about direction. Distance-like data of the sort provided by Table 3-1 can be used as input to a form of factor analysis called multidimensional scaling (MDS) (Romney, Shepard, & Nerlove, 1972; Shepard, Romney, & Nerlove, 1972). This statistical analysis converts the table of distances into a map-like representation of objects that would produce the set of distances in the table. Dawson et al. (2000) performed such an analysis on the Table 3-1 data and obtained the map that is given in Figure 3-10. This map makes the relative spatial locations of the cities obvious; it could be used to simply “read off ” compass directions between pairs of places.
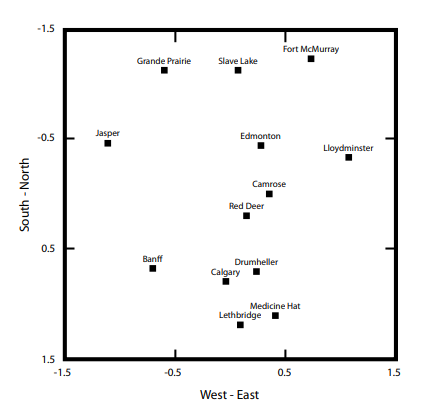
Figure 3-10. Results of applying MDS to Table 3-1.
“Reading off ” information from a representation intuitively means accessing this information easily—by using a small number of primitive operations. If this is not possible, then information might be still be accessed by applying a larger number of operations, but this will take more time. The ease of accessing information is a result of the relationship between structure and process.
The structure-process relationship, producing second-order effects, underscores the value of using relative complexity evidence, a notion that was introduced in Chapter 2. Imagine that a physical symbol system uses a tabular representation of distances. Then we would expect it to compute functions involving distance very quickly, but it would be much slower to answer questions about direction. In contrast, if the device uses a map-like representation, then we would expect it to answer questions about direction quickly, but take longer to answer questions about distance (because, for instance, measuring operations would have to be invoked).
In summary, while structures are arbitrary, structure-process relations are not. They produce second-order regularities that can affect such measures as relative complexity evidence. Using such measures to investigate structure-process relations provides key information about a system’s algorithms and architecture.